
Высокая облучаемость: в РФ создан устойчивый к любой радиации робот

Манипулятор, создаваемый в России, может длительное время работать в условиях интенсивного радиоактивного излучения. Основная область его применения — сортировка радиоактивного мусора в специальных камерах. Кроме того, «железную клешню» можно будет установить на специальную мобильную технику, предназначенную для ликвидации последствий аварий без непосредственного участия человека. Например, она могла бы пригодиться во время сброса фрагментов графита с крыши взорвавшейся Чернобыльской АЭС. Рабочий прототип робота планируется собрать в конце 2019 года.
Камера безопасности
Главное предназначение нового робота — обращение с радиоактивными отходами, которые образуются на предприятиях атомной промышленности. Процесс их сортировки происходит внутри специальных герметичных камер, предотвращающих попадание опасных частиц в окружающую среду. В настоящее время для этого используют в основном механические манипуляторы, которые подразумевают присутствие оператора в непосредственной близости от рабочей области, на которую он смотрит через специальное освинцованное стекло. «Железная клешня» позволит отойти от этой практики, предоставив возможность совершать необходимые манипуляции без присутствия человека вблизи источников опасного излучения.
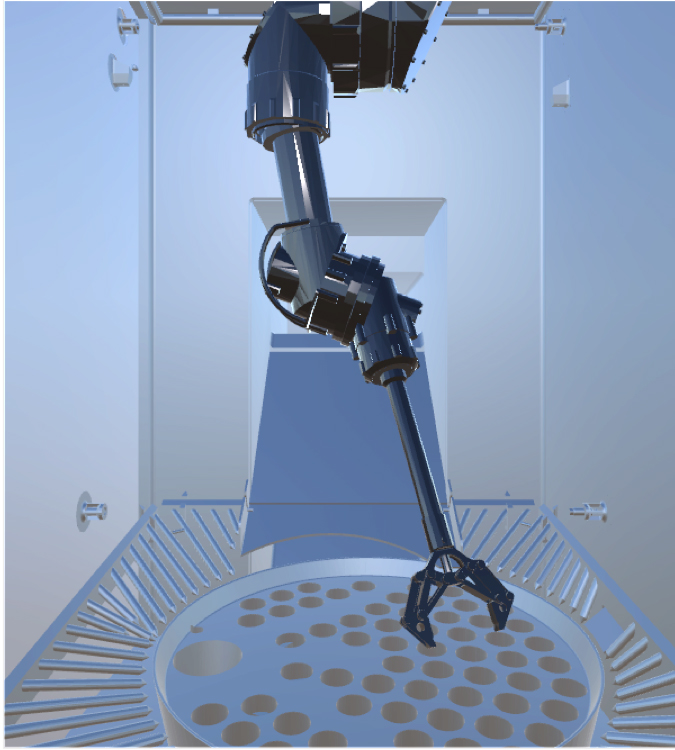

Все движения манипулятору c двухпальцевым захватом (или клешней) на конце будут передаваться не от рук человека, а от двигателей, находящихся в основании робота — через конические шестерни, расположенные на независимых валах внутри корпуса устройства. При этом, несмотря на более сложную конструкцию, отечественная разработка обеспечит свободное движение клешни со всей возможной свободой по перемещению и вращению.
— На первом этапе мы планируем реализовать ручное управление роботом при помощи джойстика-трипода с обратной связью, которая вместе с ограничениями в системе управления не позволит оператору случайно повредить манипулятор, ударив его о какое-либо препятствие, — рассказал «Известиям» старший научный сотрудник Научно-исследовательского технологического института им. С.П. Капицы Виктор Приходько. –– Визуальный контроль за рабочей областью специалист сможет вести с помощью монитора или шлема виртуальной реальности, получающих сигнал от двух видеокамер. Также 3D-очки станут применяться в специальном тренажере, который способен в точности воспроизводить манипулятор вместе с окружающей обстановкой — с его помощью планируется готовить людей, которым предстоит управлять новой техникой.
В будущем появится и автоматизированная система управления роботом, которая позволит ему действовать самостоятельно — для этого будет использована нейросеть, способная оценивать изображение с камер и выдавать устройству управляющие команды в соответствии с текущей обстановкой. В данном случае участие человека потребуется только для контроля качества выполняемой работы.

Стальной сустав
Дальнейшее развитие устройства может быть связано и с другими областями его возможного применения. В частности, благодаря особенностям конструкции, оно имеет шансы стать важной частью подвижных роботов, которые работают в жестких условиях радиоактивного заражения.
–– У большинства аналогов двигатели установлены прямо в суставах клешни. Такое решение имеет свои недостатки, –– пояснил Виктор Приходько. –– От большой дозы радиации лак на обмотках моторов разрушается и в них происходят короткие замыкания, которые полностью выводят устройство из строя. С другой стороны, если на сами манипуляторы устанавливать толстую свинцовую защиту, то им просто не хватит мощности, чтобы двигаться.
Во время эксплуатации российского устройства таких проблем возникнуть не должно, поскольку его двигатели и электронная начинка будут размещаться в основании манипулятора. За счет этого в подвижной части будет находиться только сталь, которая выдерживает огромную дозу радиации в 10 в 7-й степени грей, тогда как защищенная электроника начинает отказывать, когда доза превышает 10 в 3-й степени грей.
Таким образом, новый манипулятор с повышенной радиационной стойкостью в перспективе можно будет использовать не только для сортировки отходов, но и в качестве рабочего инструмента специальной гусеничной техники, которая сможет справляться с оперативными задачами по обеззараживанию территорий. В том числе такими экстремальными, как сброс фрагментов графита с крыши взорвавшейся Чернобыльской АЭС.
По словам ученых, стоимость отечественной разработки в сравнении с иностранными аналогами (например, с манипулятором Telbot, который стоит около €3 млн) при сопоставимых характеристиках будет в десятки раз ниже.

–– Разработка НИТИ им. С.П. Капицы должна актуализировать имеющийся опыт применения манипуляторов с оглядкой на современную электронно-компонентную базу и технологии, –– рассказал начальник отдела проектирования робототехнических систем ЦНИИ РТК Александр Трутс. –– Особенно значимым изменением здесь выступит внедрение системы управления с контуром безопасности, которая вкупе с интерфейсом виртуальной реальности позволит руководить манипулятором практически на интуитивном уровне и будет удобна для оператора.
Вместе с тем эксперты заявили об ограниченности рынка манипуляторов предложенного типа.
–– В России в эксплуатацию вводят по 3–5 защищенных (или «горячих») камер в год, именно для них будет актуально использование новой разработки, –– отметил заместитель гендиректора ФГУП «РосРАО» Сергей Флоря. –– Если же говорить о замене манипуляторов в старых камерах, то даже при условии их взаимозаменяемости, придется заниматься длительным оформлением разрешительных документов. На мой взгляд, это практически исключает экономическую целесообразность данной операции. С другой стороны, новые манипуляторы действительно можно поставить на спецтехнику для ликвидации аварий, что может стать дополнительной сферой их использования после запуска производства.
Рабочий прототип робота планируется создать в конце 2019 года.


